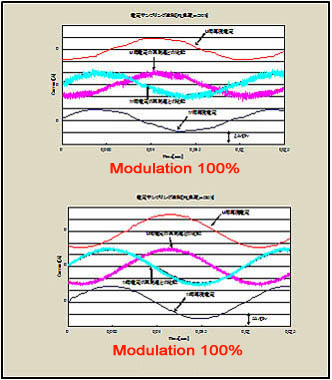
With 1- shunt systems, in some areas of current detection can get missed. This causes harmonic noise and distorted current waveforms.
In our advanced 1 shunt system, these problems are solved and this technology is highly effective for air conditioning and fan motor drives because offset current attenuation leads to cost reduction. |
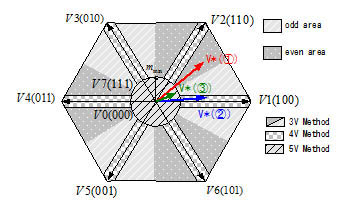 |
1. Under any conditions, current can be detected at carrier- 1 frequency
2. In high rotation (voltage) area, current’s mean value can be measured.
3. Simplified software can be applied to any case or state

Not only for consumer appliaces, this technology can be utilised for industrial applications, especially for electric cars. |
|
 |
|
|
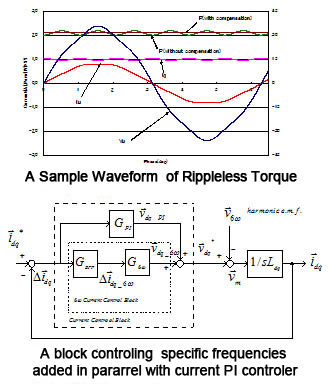
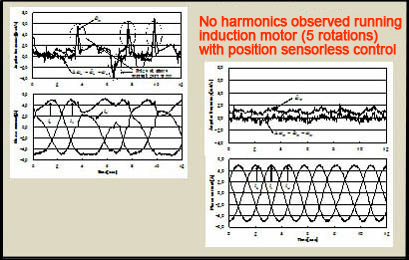
Motor voltage harmonics cause torque ripples. With conventional curent control methods, harmonic current waves cannot be precisely tracked.
.By tracking harmonic current waves using an adaptive filter,, torque ripples can be greatly minimised. |
 |
Torque Control in Conjunction with Motor Drive Development
|
|
|
| In order to reduce current waveform distortion and torque ripples, dead-time compensation plays a very important role as wel as position sensorless control in power electronics |
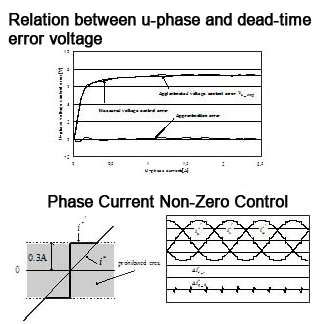 |
Automated measurement system for voltage error patterns/Automated Implementation
|
|
|
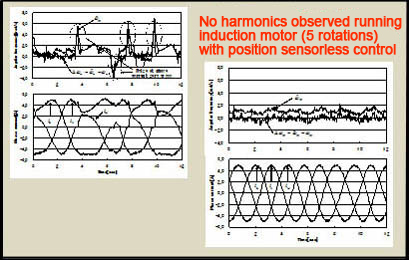
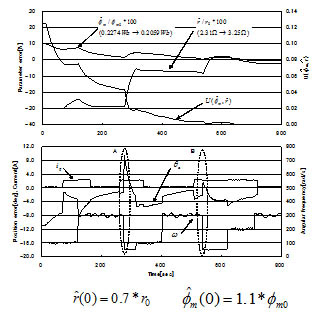
More reliability and stability are achieved by our advanced system identification for motor control parameters especially for position sensorless control
• Tenperature variation of motor register
• Temperature variation and the individual differences of permanent magnet interlinkage flux |
For position sensor controls, advanced system identification is being devloped to detect control error factors; for current sensor offset, encorder angle/position offset, etc.
|
 |
|
